Cryst Inno @ 通用雙足機器人底盤
痛點
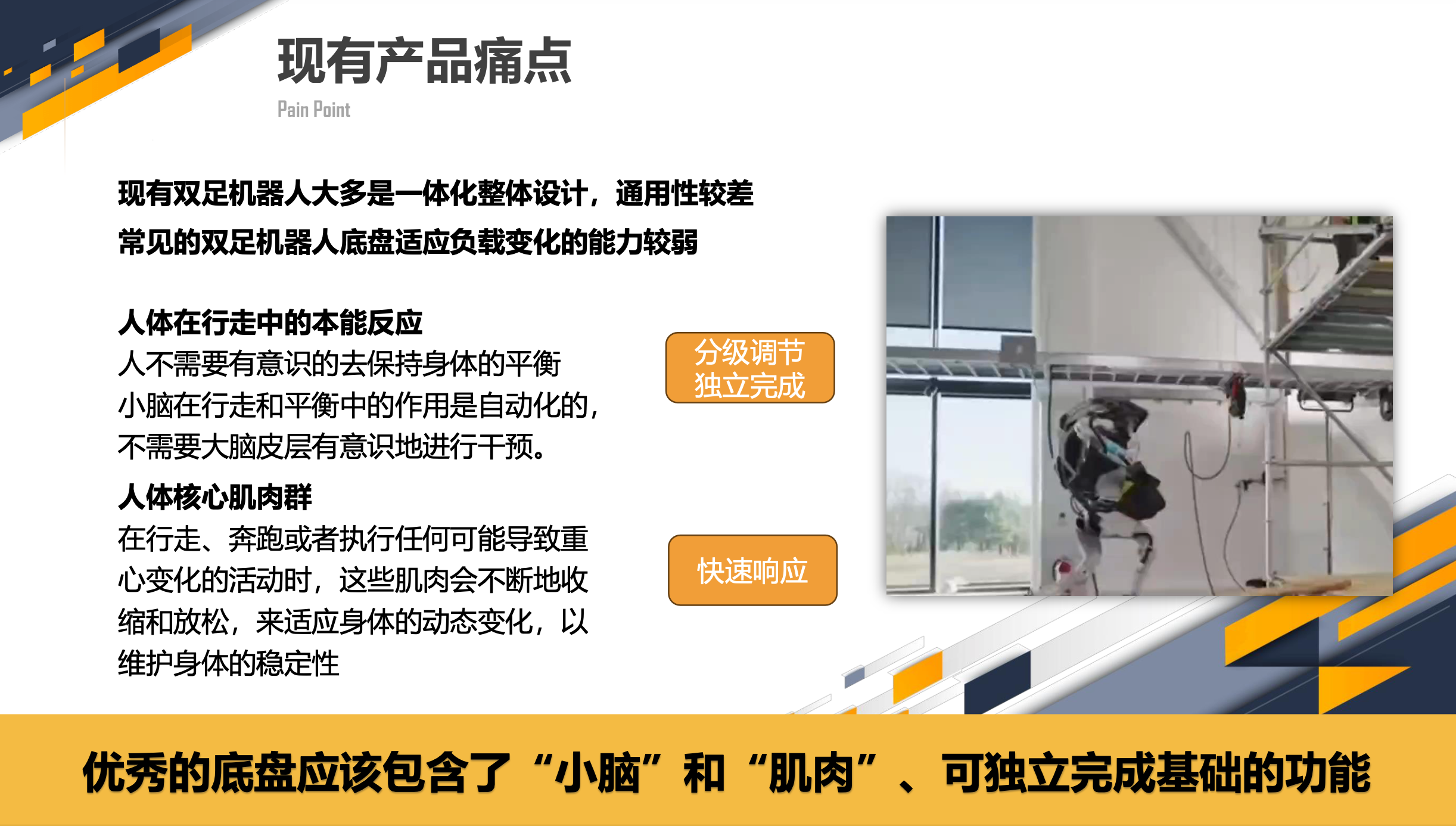
現有雙足機器人大多是一體化整體設計,
通用性較差。
1. 常見雙足機器人底盤適應負載變化的能力較弱
人體在行走中的本能反應,人不需要有意識地去保持身體的平衡,小腦在行走和平衡中的作用是自動化的,不需要大腦皮層有意識地進行干預。
2. 人形機器人開發的困難 - 平衡問題
雙足機器人技術難度大,尤以平衡問題為最甚。雙足更換了行走模式,但不應過多增加開發的成本。
3. 人體核心肌肉群 - 難以模擬
在行走、奔跑或者執行任何可能導致重心變化的活動時,這些肌肉會不斷地收縮和放鬆,來適應身體的動態變化,以維護身體的穩定性。
目標市場
1. 研究院、大學實驗室:
助力已有項目快速落地、降低研發成本
2. 下游機器人企業:
助力下游機器人企業在細分領域的應用
3. 工業自動化企業:
作為移動載重、巡視平台
4. 服務業、教育、醫療應用:
裝載和運輸重型設備

核心解决方案
通用雙足機器人底盤
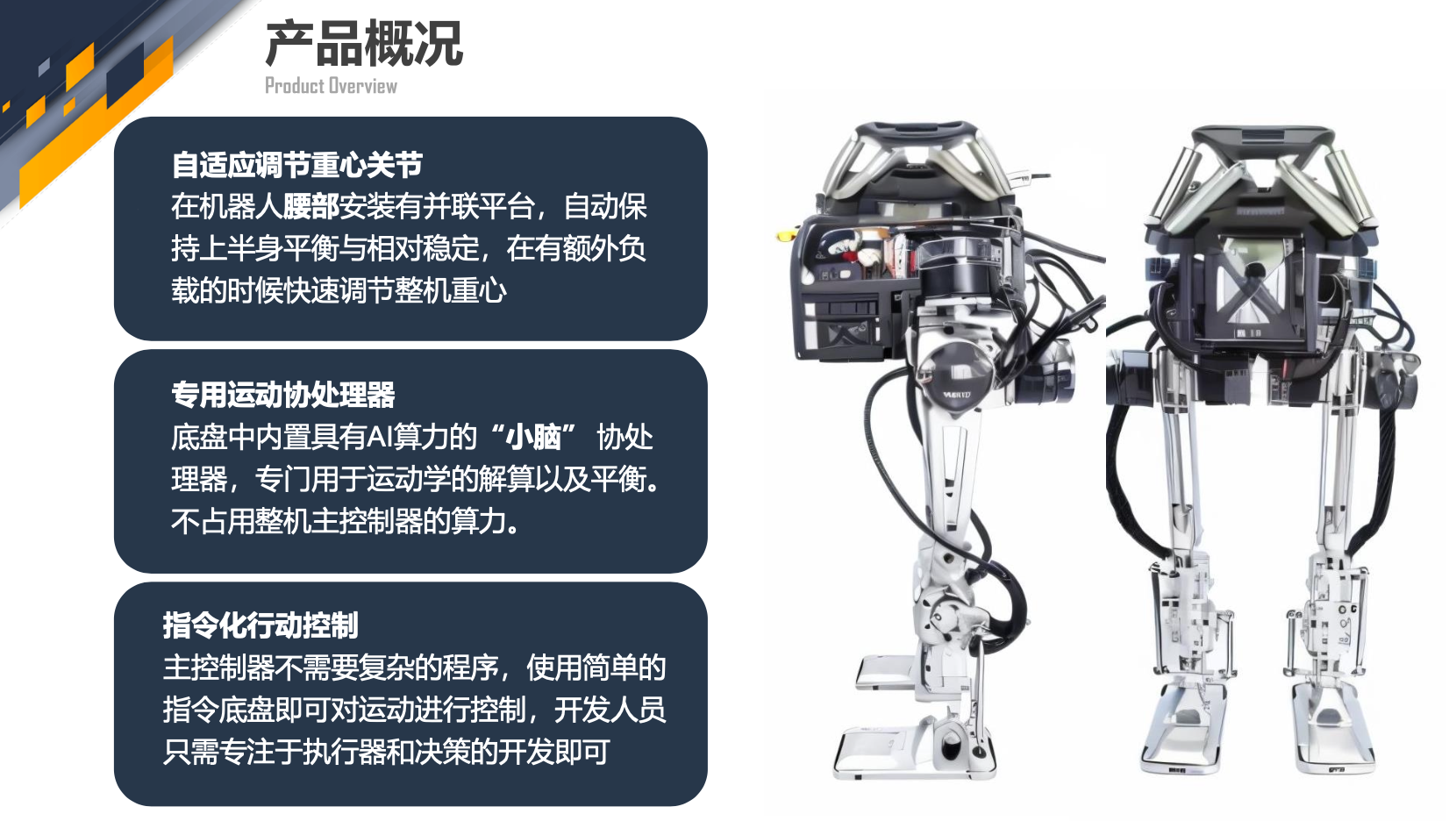
1. 自適應調節重心關節:
在機器人腰部安裝有並聯平台,能自動保持上半身的平衡與相對穩定,在有額外負載的情況下能快速調節整機重心。
2. 專用運動協處理器:
底盤內置具有AI算力的「小腦」協處理器,專門用於運動學的解算以及平衡控制,不占用整機主控制器的算力。
3. 指令化行動控制:
主控制器不需要複雜的程序,使用簡單的指令即可對底盤運動進行控制,開發人員只需專注於執行器和決策的開發即可。

Loading...
联系方式

